2020
2(62)
DOI: 10.37190/arc200211
Introduction
It is becoming increasingly important to preserve and
maintain the current condition of cultural heritage sites
that have become damaged over the years due to human
and natural activity [1]. Proper preservation requires reli-
able tools that oer accurate diagnostics of current con-
ditions of the site. The latest advances in surveying tech-
nology, particularly that of 3D terrestrial laser scanning
(TLS), give the opportunity to study damage and material
decay using analysis of 3D point clouds generated by dif-
ferent instruments and techniques [2], [3]. Among them,
TLS data are widely and successfully used for structural
health monitoring in both civil engineering [4] and cultur-
al heritage [5]. This paper focuses on detecting changes to
a monument inicted by climatic erosion, human activity,
the spread of lichen, and the progress of archaeological
excavations. This monument is El Fuerte de Samaipata
– a huge sculptured rock densely covered with petro-
glyphs, niches, terraces, and platforms. The erosion oc-
curring on Samaipata rock has been addressed by earlier
studies [6]–[8] but no attempts to determinate its rate and
extent have yet been made.
Anna Kubicka*, Jacek Kościuk**
Determining the rate of erosion and lichen spread on Samaipata rock
by comparing 3D laser scan results from two different surveying epochs
Określanie stopnia erozji i tempa rozprzestrzeniania się porostów
na skale Samaipata przez porównanie wyników
skanowania laserowego 3D z dwóch różnych epok pomiarowych
In the case of Samaipata rock, the main obstacle and
dierence between similar studies of deformation meas-
urement [9], [10], [2] based on repeated TLS is the con-
siderable disparity in the parameters of the two dierent
instruments used for the scanning – the ILRIS-3D laser
scanner produced by Optech in 2006 and the ScanSta-
tion P40 introduced by Leica Geosystems in 2016. Both
scanners belong to two entirely dierent epochs of TLS
technology development; therefore, their technical char-
acteristics dier considerably.
This paper describes the three issues of 3D scanning
the Samaipata rock – the inner registration of the data
acquired in two dierent survey campaigns, the global
co-registration of the resulting two 3D point clouds, and
the methods of detecting dierences between them. Two
methods of cloud-to-cloud comparison were used to ad-
dress the last issue (“nearest neighbour distance” and “lo-
cal modeling”) in CloudCompare – an open source project
[11]. In the conclusion of this paper, we will present the
potential and limitations of analysing damage on the rock
surface using measurements collected by TLS from two
dierent sources.
Acquisition of the TLS data in 2006 and 2016
on El Fuerte de Samaipata
Due to the scale of the entire site – the Samaipata rock
itself measures 80 × 240 m and the entire site ca. 400 ×
500 m, 3D TLS was the rst choice of surveying method.
The team from the University of Arkansas collected the
* ORCID: 0000-0001-5442-3947. Faculty of Architecture, Wroc-
ław University of Science and Technology, e-mail: anna.kubicka@pwr.
edu.pl
** ORCID: 0000-0003-0623-8071. Faculty of Architecture, Wroc-
ław University of Science and Technology.
126 Anna Kubicka, Jacek Kościuk
rst TLS data of the area of sculptured rock in three days
(25–27.07.2006) [12]. The instrument used for this pur-
pose, an ILRIS-3D scanner, had a scanning range from
3 to 1200 m, a data acquisition rate of 2000 pts/sec, an
angular accuracy of 16″, and a nominal range accuracy of
7 mm @ 100 m. More details can be found at the manufac-
turer’s website [13]. The area to be scanned was covered
with 78 scan stations with an average range accuracy of
20.8 mm @ 20 m. Particular scans did not cover the full
horizontal extent but were limited to 40°/40° angular sec-
tions with typical overlap between the scans of not more
than 20–30%. This resulted in rather modest density of the
nal 3D point cloud.
Ten years after the rst survey, the team from the Labo-
ratory of 3D Scanning and Modeling covered the area of
Samaipata rock with a second TLS survey. In this case,
a Leica ScanStation P40 scanner was used. The huge pro-
gress in 3D laser scanning technology over the ten years
between the rst and the last scan resulted in considerable
improvement of the technical parameters of scanners. Al-
though the scanning range of the Leica P40 scanner was
much shorter (0.4 m to 270 m), for Samaipata rock this
had no particular impact. More critical were other param-
eters – a data acquisition rate reaching 1 mln pts/sec, an-
gular accuracy of 8″ horizontal and vertical, and nominal
range accuracy of only 1.2 mm @ 270 m. More details,
particularly on data noise, can be found at the manufac-
turer’s website [14].
Over the 14 days of eldwork, data from 278 scan sta-
tions was collected. Nearly all of the stations covered 360°
of horizontal extent, so when all of them were registered
into a common coordinate system, the density of the nal
3D point cloud was not worse than 5 × 5 mm. Over 14.5
thousand constraints were used for this registration. The
mean absolute error for constraints was 3 mm. The most
signicant errors were noticed on printed black and white
(B & W) targets attached to the platforms surrounding the
rock, which were caused by heavy vibrations from peo-
ple walking. Very strong winds also partially aected the
small tripods used for the Leica HDS targets. Weighting
was used for registration errors not exceeding 10 mm, and
in the case of more signicant errors, this constraint was
eliminated from calculations.
The referencing of all printed B & W targets to the com-
mon survey network was done with a Leica TCRP1203
Total Station. Its angular accuracy is of 3″, and the dis-
tance error is in the range of ±2 mm + 2 ppm. These
parameters, together with angular and distance observa-
tions between all pairs of mutually visible positions of
the instrument, allowed the survey network points to be
aligned with an average x, y point position square error
equal to 6.8 mm and average height square error equal to
2.9 mm.
Due to the dierences between the technical speci-
cations of both scanners, the scanning parameters, and
number of scan stations, point clouds from ILRIS 3D and
Leica P40 vary in terms of point density and noise range
(Fig. 1).
Global co-registration of the point clouds
The registration of a 3D point cloud from two dierent
surveying epochs and from two dierent laser scanners
was a critical step for the whole procedure. The most pop-
ular approach, available in both CloudCompare and Leica
Cyclone software is the “Iterative Closest Point” (ICP)
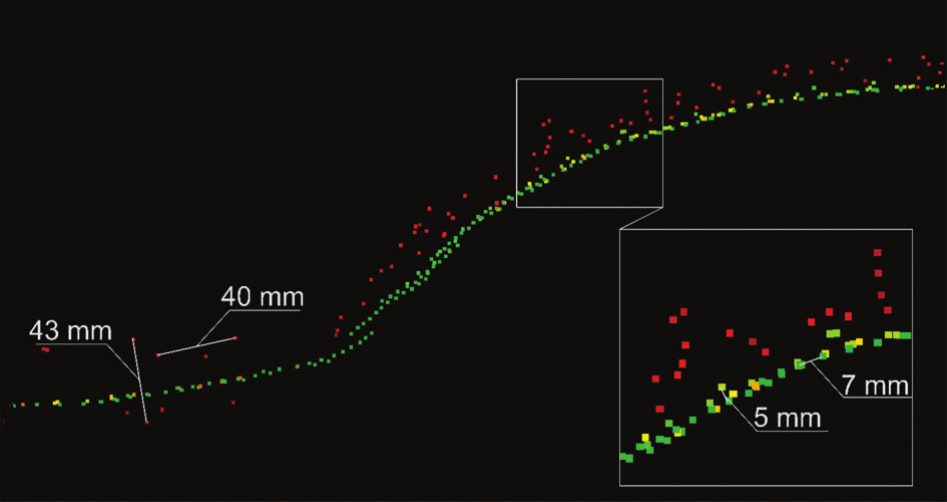
Fig. 1. Section of the point cloud of a petroglyph in sector W05. Visual comparison of point cloud (6 mm width) density and noise range
between two 3D point clouds: red – ILRIS 3D (scan 2006); green – Leica P40 (scan 2016)
(elaborated by A. Kubicka)
Determiningtherateoferosionandlichenspread / Określaniestopniaerozjiitemparozprzestrzenianiasięporostów 127
method [15]–[17]. It searches for pairs of nearest points
in two data sets and estimates the rigid body transforma-
tion that aligns them. This transformation is applied to all
points of the transformed data set, and the procedure is
repeated until required convergence is achieved [18, p. 5].
Another type of approach used in similar studies for the
global 3D cloud as well as the co-registration of surfaces
is the method of “Least Squares 3D Surface Matching”
(LS3D) [19]. On two overlapping 3D point clouds, this
method estimates the transformation parameters of one
3D cloud (or surface) with respect to a 3D template by
minimising the sum of squares of the Euclidean distanc-
es between the 3D points (or surfaces). Both methods are
widely used for the purpose of global co-registration in
studies of deformation analyses based on TLS data [9],
[10], [20], [21].
The approach proposed in this paper is also based on
the ICP method available in Leica Cyclone software for
cloud-to-cloud registration. Due to the lack of man-made
targets in the 3D point cloud from the 2006 survey, the
registration of data from separate scan stations was done
by selecting pairs of corresponding points on both 3D
clouds. At least four pairs of such points needed to be cho-
sen. Since the density of 3D clouds from the 2006 survey
was not very high, it was often dicult to nd adequately
matching pairs of points, therefore six–eight pairs were
usually chosen. In the next step, primary transformation
parameters resulting from this rough estimation were fur-
ther optimised by minimising root mean square (RMS)
error. At least 200 iterations were used.
In some cases, due to insucient overlap between scans
from 2006, it was necessary to add scans from the 2016
survey in order to merge all the data into one coherent
whole. Since the scans from 2016 were already oriented
according to our survey network, choosing one of them as
the home scanworld resulted in the same orientation of the
entire merged 3D point cloud.
Over 300 constraints were used for this registration.
The mean absolute error for constraints was below 5 mm.
Weighting was used for registration errors not exceeding
10 mm, and in the case of more signicant errors, this
constraint was eliminated from calculations.
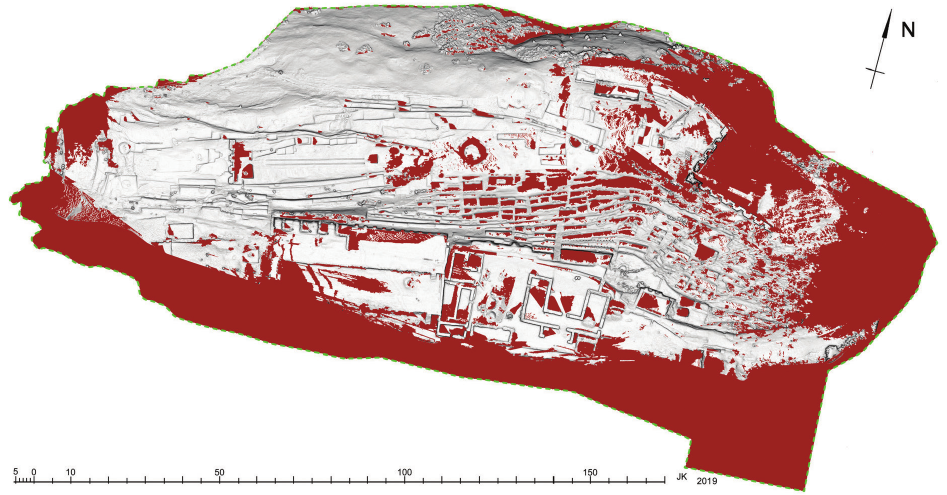
The nal results of co-registering the scans from 2006
and 2016 (Fig. 2) show dierences between the extent of
these two surveying epochs.
Methods of comparing scan results
In general, results from the two dierent surveying ep-
ochs can be compared in three ways – using only raw data
(3D point clouds), using deliverables from processing 3D
point clouds (mesh surfaces), or comparing the 3D point
clouds to meshes. All of them can be computed with the
open source software CloudCompare.
The rst method is usually called the nearest neighbour
distance. This algorithm searches for the Euclidean dis-
tance between two nearest points in both the clouds – the
reference point cloud and the point cloud being compared
[22]. For this method, the denser cloud should be used as
the reference point cloud. Only areas exactly covered by
both the scans can be directly compared. Otherwise, dis-
torted results can appear.
The second method, known as global modeling, com-
pares two surface models (meshes) derived from 3D point
clouds. For complicated and detailed surfaces, this in-
volves long computation times. Additionally, local occlu -
sions in compared data resulting in irregular triangular
meshing can again lead to erroneous results.
Fig. 2. Comparison of extents of 2006 and 2016 scans.
In grey: areas where both scans overlap, in brown: areas covered by only one scan (either 2006 or 2016)
(elaborated by A. Kubicka)

128 Anna Kubicka, Jacek Kościuk
The last method implemented in CloudCompare is
called local modeling. In this method, the dense 3D cloud
is compared to the mesh derived from the sparse point
cloud. As a result, the distance is calculated between 3D
points on the dense cloud and the nearest point lying on
the surface model as a mesh [23]. In addition to reduced
computation time, this method also results in better ap-
proximation of dierences between compared data.
Analysis of changes in the rock surface
based on data
from two different scanning epochs
Analysis involved three key steps:
– Selecting the specic areas to be analysed. These
were typically subsets of the damaged area;
– Orienting the selected area alongside the main axis,
so, for example, the vertical face corresponded to the
x–z plane;
– Estimating the deformation parameters for each se-
lected subset.
The smaller the size of the analysed area, the better
the resolution of the estimated deformations. Deforma-
tions can be analysed alongside specic axes (x, y, or z) or
globally. In the last case, the result shows only as absolute
values of dierences in Euclidean distance, without indi-
cating the dominant direction.
For analysis along one of the selected axes, it is impor-
tant to consider which of the data sets was the reference
data set and which was the compared data set. Therefore,
if, for example, the survey from 2016 was mapped as the
reference data set, negative values of deformation anal-
ysis would correspond to the declined zones of the rock
surface, and analogically, positive values would represent
material accumulated on the rock surface – mostly, prod-
ucts of rock erosion or vegetation. Reversing the mapping
would result in the opposite interpretation.
Due to the high level of noise, especially on scans from
2006, and due to the signicant dierence in the density
of scans from both surveying epochs, a distance of 0.02 m
was chosen as the threshold value for detecting defor-
mations. All results below this threshold were treated as
a side eect of the technical shortcomings of the scans. In
order to eliminate accidental data resulting from inaccu-
rate data ltration (dust particles in the air, people moving
through the area, big plants, etc.), the upper threshold for
detecting deformations was set to 0.2 m.
As the rst example of the feasibility of data sets col-
lected in the year 2006 and 2016 for analysing the pro-
gress of erosion on Samaipata rock, the front wall of a ter-
race in sector S27 will be used
1
.
Computation of distances between two data sets an-
alysed alongside the z-axis (Fig. 3) showed particularly
signicant changes (in the range of 0.2 m) at the foot of
the vertical wall of the terrace. An analysis of excavation
logs indicates that in the years 2006–2016, archaeological
works were carried out here. However, the changes within
1
Cf. J. Kościuk, G. Oreci, M. Ziółkowski, A. Kubicka, R. Muñóz
Risolazo, Description and analysis of El Fuerte de Samaipata in the
lightofnewresearch,and aproposalofthe relativechronologyofits
main elements, in the same issue of “Architectus”.
Fig. 3. Part of the front wall of the terrace in sector S27. Results of deformation analysis along the z-axis
(elaborated by A. Kubicka)
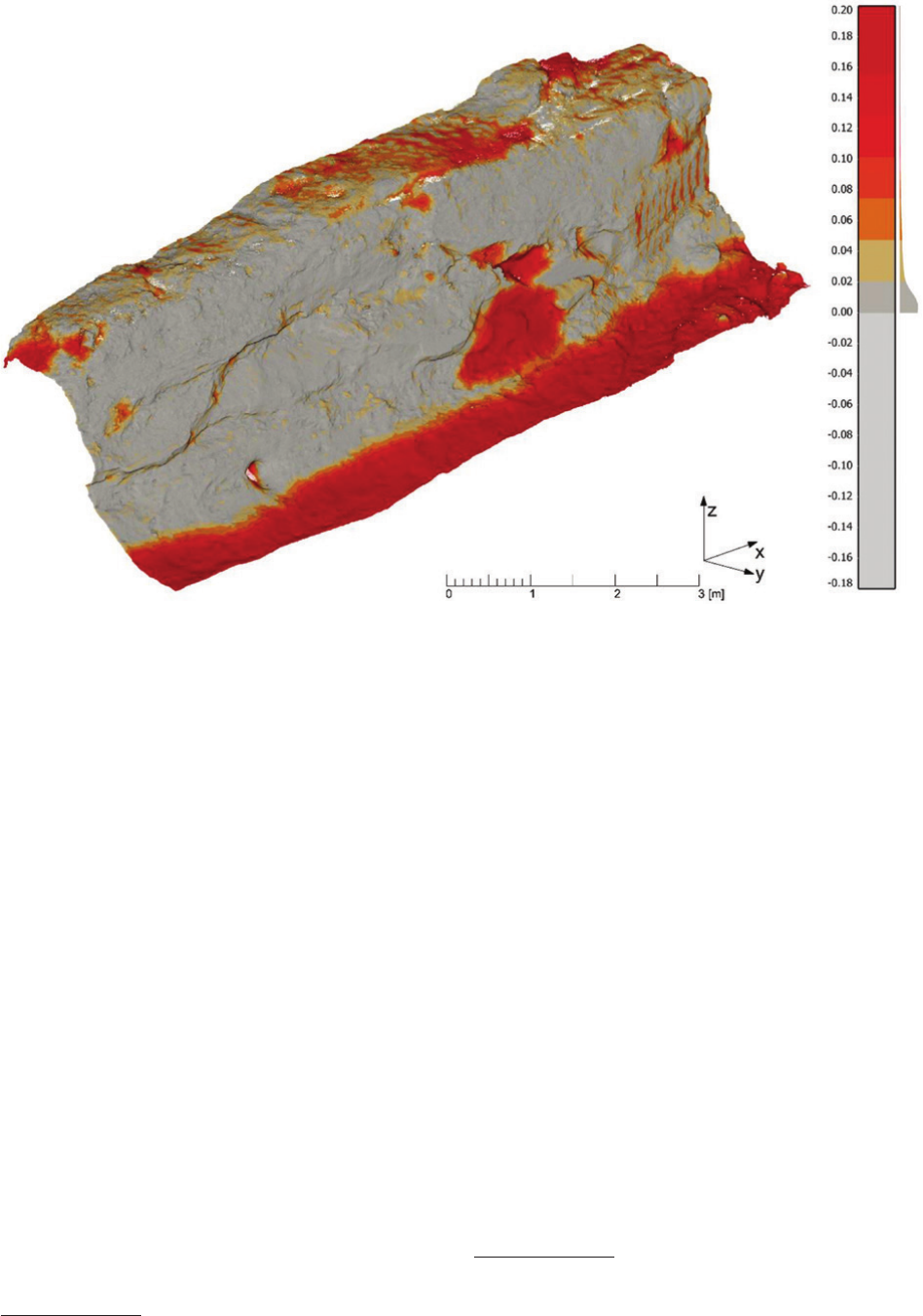
Determiningtherateoferosionandlichenspread / Określaniestopniaerozjiitemparozprzestrzenianiasięporostów 129
the terrace front wall cannot be explained by the progress
of archaeological prospection. A big cavity, an evident
place of local erosion, expanded by more than 0.2 m. Mi-
nor changes (0.02–0.06 m) observed in the upper surface
of the terrace can be attributed to rock erosion as well as
the reduction in vegetation due to the constant eorts of
the local restoration team. These observations can be fur-
ther conrmed by global deformation analysis expressed
in absolute values (Fig. 4). In this, the erosion cavities in
the front wall are even more visible. Additionally, on the
right part of the analysed wall, traces of water erosion
(parallel vertical stripes) can be detected.
The highly eroded petroglyph
2
localised in sector W06
can be used as another example of detected rock erosion.
In this case, due to much smaller dierences, the upper
and the lower thresholds were set to ±0.005 m. For this
petroglyph, results of local modeling along the z-axis
(Fig. 5) show that mostly the western and northern are-
as of the petroglyph were inuenced by erosion, which
ranged from –0.003 m to –0.005 m. The positive values
alongside the south-eastern edge of the petroglyph are the
eects of growing vegetation.
Analysis of the petroglyph from sector W05 with the
clearly recognisable silhouette of a feline is a dierent
2
Cf. J. Kościuk, G. Oreci, M. Ziółkowski, A. Kubicka, R. Muñóz
Risolazo, Description and analysis of El Fuerte de Samaipata in the
lightofnewresearch,andaproposalof therelativechronologyofits
main elements, in the same issue of “Architectus”.
case
3
. There, the 3D point cloud acquired in 2006 from
the ILRIS 3D scanner has signicant noise in the range
of ±0.002 m (Fig. 6). Therefore, it was necessary to ex-
clude this range from further interpretations. Expanding
the upper and lower thresholds of deformation analysis
respectively to –0.010 and +0.06 did not bring particu-
larly useful results. A few positive anomalies (yellow and
orange spots) were caused by growing vegetation. Neg-
ative anomalies detected in a small ditch encircling the
feline gure are the results of erosion caused by water
always present in this depression. A more general obser-
vation is that the at areas where rainwater remains for
a longer period show positive anomalies (aquamarine col-
our), while more steep areas present negative anomalies
(green colour).
The possible interpretation is that positive anomalies
are associated with mosses and lichens that grow better on
more wet surfaces, while negative anomalies (on sloping
surfaces) are the result of frequent and more rapid changes
of moisture in the rock that cause the swelling and shrink-
age of smectites present
4
. However, due to the technical
3
Cf. J. Kościuk, G. Oreci, M. Ziółkowski, A. Kubicka, R. Muñóz
Risolazo, Description and analysis of El Fuerte de Samaipata in the
lightofnewresearch,andaproposalof therelativechronologyofits
main elements, in the same issue of “Architectus”.
4
Cf. W. Bartz, J. Kościuk, M. Gąsior, T. Dziedzic, Petrographic,
mineralogical, and climatic analyses, and risk maps for conservation
strategies, in the same issue of “Architectus”.
Fig. 4. Part of the front wall of the terrace in sector S27. Results of global deformation analysis (absolute values)
(elaborated by A. Kubicka)
130 Anna Kubicka, Jacek Kościuk
Fig. 5. Petroglyph from sector W06.
Local modeling analysis along the z-axis
(elaborated by A. Kubicka)
Fig. 6. Petroglyph from sector W05.
Local modeling analysis along the z-axis
(elaborated by A. Kubicka)
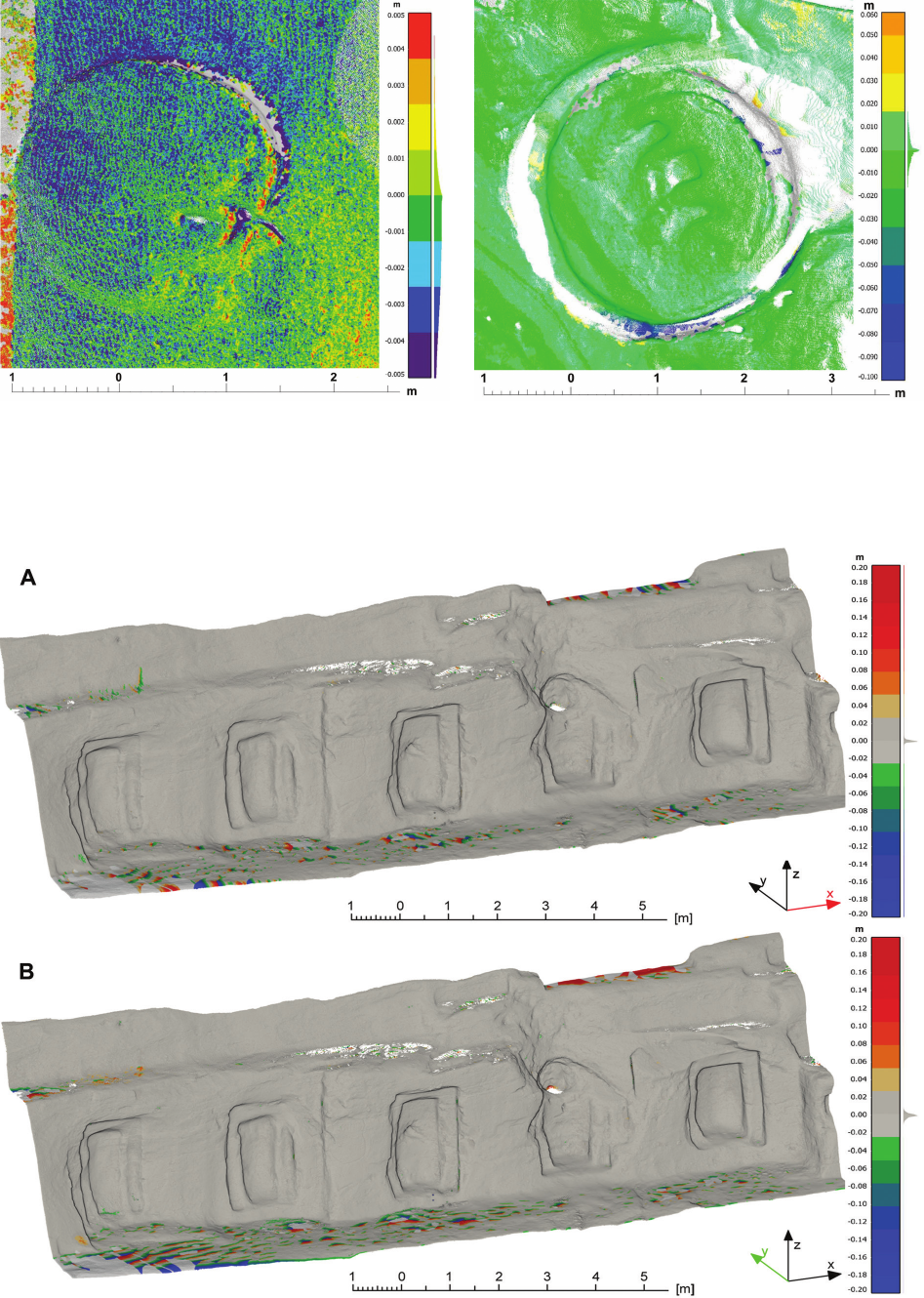
Fig. 7. The southern face of the wall with double recessed niches in sector S09:
A – local modeling analysis along the x-axis;
B – local modeling analysis along the y-axis
(elaborated by A. Kubicka)
Determiningtherateoferosionandlichenspread / Określaniestopniaerozjiitemparozprzestrzenianiasięporostów 131
shortcomings of the acquired data, all these interpretations
should be treated with extreme caution.
In some cases, despite eorts and searching for the best
parameters for the analysis, no signicant anomalies could
be detected. A good example is the unnished fragment of
the southern rock face with double recessed niches lying in
sector S09 (Figs. 7, 8). With the upper and lower threshold
of deformation analogous to the case of the terrace face
in sector S27 (±0.20 m), analysis according to the x-axis
(Fig. 7A), the y-axis (Fig. 7B), and the z-axis did not show
any noticeable anomalies. The only exception was the at
area in front of the niches where products of erosion (sand
and small stones) accumulated. The same results were ob-
served in the global comparison analysis (Fig. 8).
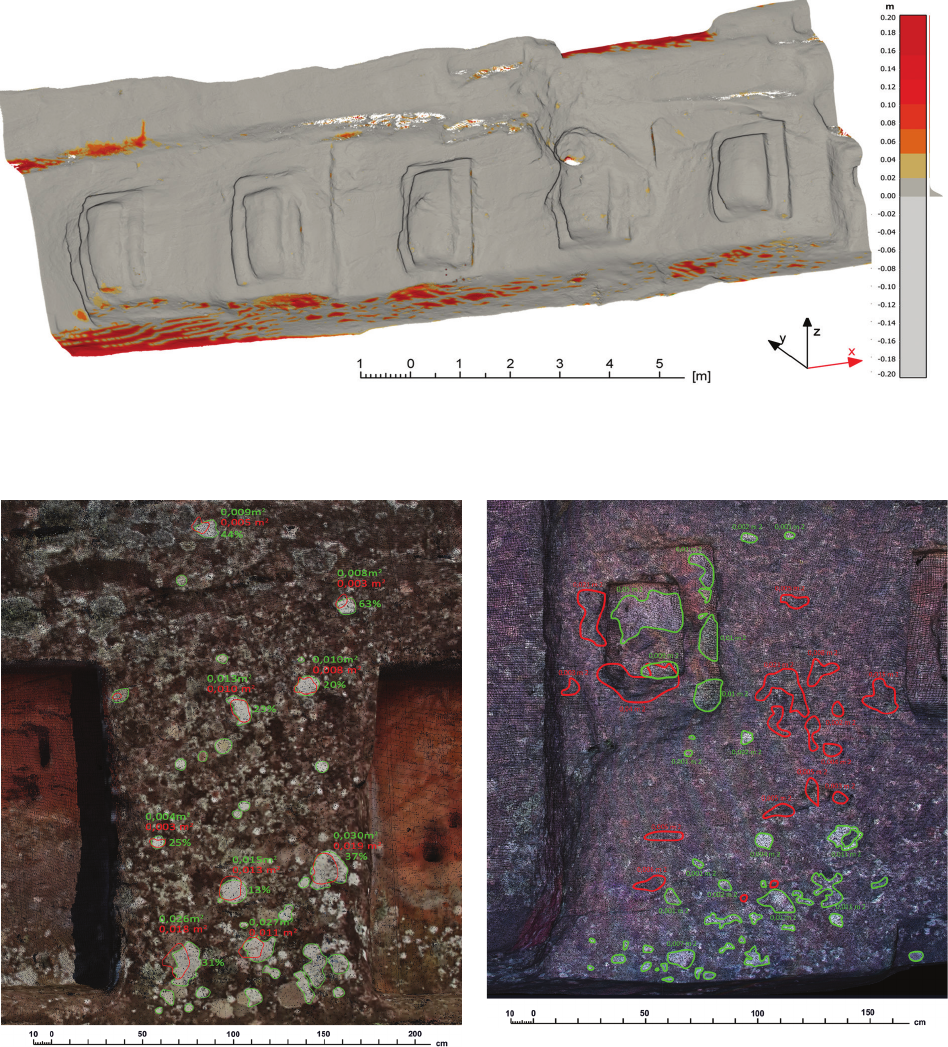
Detection and comparison of lichen spread
on the surface of the rock
Data from the 2006 and 2016 TLS surveys were also
used to detect the spread of lichen. By using dierent ren-
Fig. 8. The southern face of the wall with double recessed niches in sector S09. Global comparison analysis in absolute values
(elaborated by A. Kubicka)
Fig. 9. Wall with niches from sector S08. Orthoimage from the 3D
point cloud obtained in 2016 with information on lichen spread
in 2006 (red colour) and 2016 (green colour) (elaborated by A. Kubicka)
Fig. 10. Wall with double niches from sector S09.
Orthoimage from the 3D point cloud obtained in 2016 with information
on size of lichens in 2006 (red colour) and 2016 (green colour)
(elaborated by A. Kubicka)

132 Anna Kubicka, Jacek Kościuk
dering options and dierent parameters of 3D point cloud
visualisation, it was possible to produce natural-colour or-
thoimages sharp enough to calculate an increase, decrease,
or full extinction of lichen. Orthoimages were exported
to a CAD 2D environment and then properly scaled and
superimposed. The margins of the lichens were then on-
screen digitised and areas of each lichen were calculated.
Two specic fragments of Samaipata rock were chosen as
examples to present the results of this method.
The rst example illustrates a case in which lichens
identied in 2016 as biologically active using infrared
photographs
5
were analysed (Fig. 9). Compared to 2006
data, individual lichens had increased their surfaces by
20–63%. The second example illustrates a case where
over the 10 years, some lichens disappeared and new ones
started to grow (Fig. 10). Some of them, already invisible
in 2006, were able to expand to 0.65 m
2
in 2016.
Again, as in the case of deformation analyses, the qual-
ity of scan data played an essential role in the applicability
and accuracy of the study. Notably, the density of 3D point
data had a direct inuence on the quality of resulting or-
thoimages and therefore on the precision of the margins of
lichens on-screen digitising.
5
Cf. B. Ćmielewski, I. Wilczyńska, C. Patrzałek, J. Kościuk, Digi-
tal close-range photogrammetry of El Fuerte de Samaipata, in the same
issue of “Architectus”.
Conclusions: results and limitations
The general conclusion is that despite some technical
limitations resulting from the specications of scanners
from two entirely dierent stages of TLS technology
development, the method of monitoring rock erosion
and lichen spread by comparing two data sets from two
dierent surveying epochs has great potential. The other
factor that should also be taken into account is the fact
that the Arkansas team had only three days to com-
plete its eldwork [12]. The TLS survey in 2016 lasted
for 14 days, so the number of overlapping scan stations
and resulting density of data was much higher. Never-
theless, despite these limitations, it was possible to de-
tect ano malies in the range of 0.02 m and in some cases
even smaller.
Judging from the obtained results, it might be advis-
able that within the next 10 years, a TLS survey should
be repeated with specication (accuracy, density, noise)
not worse than that of 2016 – if not a scan of the whole
rock, then at least a scan of its most important fragments.
Repeated comparison of data from the other two periods
will better determine the speed of erosion and indicate the
places most exposed to it.
The use of TLS data for monitoring the state of heritage
monuments is becoming increasingly common [24], [25]
and is particularly worth recommending in the case of El
Fuerte de Samaipata.
References /Bibliografia
[1] Moropoulou A., Delegou E.T., Labropoulos K. et al., Non-destruc-
tivetechniquesasatoolfortheprotectionofbuiltculturalheritage,
“Construction and Building Materials” 2013, No. 48, 1222–1239,
doi: 10.1016/j.conbuildmat.2013.03.044.
[2] Lachat E., Landes T., Grussenmeyer P., Comparison of point cloud
registration algorithms for better result assessment – towards an
open-source solution, “The International Archives of the Photogram-
metry, Remote Sensing and Spatial Information Sciences” 2018,
Vol. XLII-2, 551–558, doi: 10.5194/isprs-archives-XLII-2-551-2018.
[3] Rabbani T., Dijkman S., van den Heuvel F. et al., An integrated ap-
proach for modelling and global registration of point clouds, “The
International Archives of the Photogrammetry, Remote Sensing and
Spatial Information Sciences” 2007, Vol. 61, Iss. 6, 355–370, doi:
10.1016/j.isprsjprs.2006.09.006.
[4] Dąbek P.B., Patrzałek C., Ćmielewski B. et al., The use of terrestrial la-
ser scanning in monitoring and analyses of erosion phenomena in nat-
ural and anthropogenically transformed areas, “Cogent Geoscience”
2018, Vol. 4, No. 1, 1–18, doi: 10.1080/23312041.2018.1437684.
[5] Selbesoglu M.O., Bakirman T., Gokbayrak O., Deformation Meas-
urement Using Terrestrial Laser Scanner for Cultural Heritage,
“The International Archives of the Photogrammetry, Remote Sens-
ing and Spatial Information Sciences” 2016, Vol. XLII-2/W1, 89–93,
doi: 10.5194/isprs-archives-XLII-2-W1-89-2016.
[6] Avilés S., ConservazionedeltempiodellaroccascolpitadiSamai-
pata–SantaCruz,Bolivia(Sudamerica), Tesi di Master, Università
di Bologna – Sede di Ravenna, Facoltà di Conservazione dei Beni
Culturali, Dipartimento di Storie e Metodi per la Conservazione dei
Beni Culturali 2002, www.stonewatch.de/media/download/sc%20
04.pdf [accessed: 1.11.2019].
[7] Avilés S., IntroduzioneallaconservazionedellaRocciaScolpitadi
Samaipata, Bolivia, 2011, http://www.rupestreweb.info/samaipata.
html [accessed: 1.11.2019].
[8] Avilés S., LaconservacióndelaRocaSagradadeSamaipata, [in:]
A. Meyers, I. Combès (comp.), El Fuerte de Samaipata. Estudios
arqueológicos, Universidad Autónoma Gabriel René Moreno, San-
ta Cruz de la Sierra 2015, 161–170.
[9] Monserrat O., Crosetto M., Deformation measurement using ter-
restriallaserscanningdataandleastsquares3Dsurfacematching,
“The International Archives of the Photogrammetry, Remote Sens-
ing and Spatial Information Sciences” 2008, Vol. 63, Iss. 1, 142–154,
doi: 10.1016/j.isprsjprs.2007.07.008.
[10] Gordon S., Lichti D., Stewart M., Applicationofahigh-resolution,
ground-based laser scanner for deformation measurements, “New
Techniques in Monitoring Surveys I, Proceedings of 10
th
FIG In-
ternational Symposium on Deformation Measurements” 2001,
Orange, California, 23–32, http://webarchiv.ethz.ch/geometh-data/
student/eg1/2006/14/HPLAserscanning.pdf [accessed: 20.09.2019].
[11]
CloudCompareopen-sourcesoftware, http://www.cloudcompare.org/
[accessed: 20.09.2019].
[12] Barnes A., Goodmaster C., Vranich A. et al., The El Fuerte de
Samaipata 3D Scanning Project 2005, http://www.cast.uark.edu/
samaipata/index.html [accessed: 20.09.2019].
[13] ILRIS 3D Datasheet, https://www.laserscanningeurope.com/sites/
default/les/Optech/ILRIS-Datenblatt.pdf [accessed: 20.09.2019].
[14]
Leica ScanStation P40/P30, https://leica-geosystems.com/pl-pl/
products/
laser-scanners/scanners/leica-scanstation-p40--p30 [ac-
cessed: 20.09.2019].
[15] Besl P.J., McKay M.D., A method for registration a 3D shape,
“IEEE Transactions of Pattern Analysis and Machine Intelligence”
1992, Vol. 14, Iss. 2, 239–256, doi: 10.1109/34.121791.
[16] Chen Y., Medioni G.G., ObjectModelingbyRegistrationofMul-
tipleRangeImages, “Proceedings. 1991 IEEE International Con-
ference on Robotics and Automation” 1992, Vol. 10, No. 3, 2724–
2729, doi: 10.1109/ROBOT.1991.132043.
Determiningtherateoferosionandlichenspread / Określaniestopniaerozjiitemparozprzestrzenianiasięporostów 133
[17] Zhang Z., Iterative point matching for registration of free-form
curves and surfaces, “International Journal of Computer Vision”
1994, Vol. 13, No. 2, 119–152, doi: 10.1007/BF01427149.
[18] Akca D., LeastSquares3DSurfaceMatching, Institut für Geodä-
sie und Photogrammetrie Eidgenössische Technische Hochschule
Zürich, Zurich 2017.
[19] Gruen A., Akca D., Least Squares3D Surfaceandcurve Match-
ing, “The International Archives of the Photogrammetry, Remote
Sensing and Spatial Information Sciences” 2005, Vol. 59, Iss. 3,
151–174, doi: 10.1016/j.isprsjprs.2005.02.006.
[20] Barrile V., Meduri G.M., Bilotta G., LeastSquares3DAlgorithm
fortheStudyofDeformationswithTerrestrialLaserScanner, [in:]
V. Mladenov (ed.), Recent Advances in Electronics, Signal Pro-
cessing and Communication Systems. Proceedings of the 2013
International Conference on Electronics, Signal Processing and
Communication Systems, Venice, 2013, 162–165, https://www.
researchgate.net/publication/280731000_Least_Squares_3D_
Algorithm_for_the_Study_of_Deformations_with_Terrestrial_
Laser_Scanner [accessed: 1.11.2019].
[21] Monserrat O., Crosetto M., Pucci B., TLS deformation measure-
ment using ls3d surface and curve matching, “The International
Archives of the Photogrammetry, Remote Sensing and Spatial
Informa tion Sciences” 2008, Vol. 37, 591–596, doi: 10.1016/j.is-
prsjprs.2007.07.008.
[22] Girardeau-Montaut D., Roux M., Marc R. et al., Change detection
on point cloud data acquiredwith a ground laser scanner, [in:]
G. Vosselman, C. Brenner (eds.), ProceedingsoftheISPRSWork-
shopLaserscanning2005, ISPRSArchives, International Institute
for Geo-Information Science and Earth Observation, Enschede,
2005, Vol. 36, 30–35, https://www.isprs.org/proceedings/XXXVI/
3-W19/papers/030.pdf [accessed: 1.11.2019].
[23] https://www.cloudcompare.org/doc/wiki/index.php? title=Distanc-
es_Computation [accessed: 1.11.2019].
[24] Guarnieri A., Milan N., Vettore A., Monitoring of Complex Structure
forStructuralControlUsingTerrestrialLaserScanning(TLS)and
Photogrammetry, “International Journal of Architectural Heritage”
2013, Vol. 7, Iss. 1, 54–67, doi: 10.1080/15583058.2011.606595.
[25] Park H.S., Lee H.M., Adeli H. et al., ANewApproachforHealth
Monitoring of Structures: Terrestrial Laser Scanning, “Computer-
Aided Civil and Infrastructure Engineering” 2007, Vol. 22, Iss. 1,
19–30, doi: 10.1111/j.1467-8667.2006.00466.x.
Acknowledgements /Podziękowania
Thepresentedworkispartoftheresearchsponsoredbythegrantgiv-
entotheWrocławUniversityofScienceandTechnologybythePolish
National Science Centre (grant No. 2014/15/B/HS2/01108). Additio-
nally,themunicipalityofSamaipata,representedbyMayorFalvioLó-
pesEscalera, contributed to this researchby providingthe accommo-
dationduring the eldwork inJune and July 2016, aswell as in July
2017. The Ministry of Culture and Tourism of Bolivia kindly granted
all necessary permits (UDAM No. 014/2016; UDAM No. 060/2017).
The research was conducted in close cooperation with the Centrefor
Pre-Columbian Studies of the University of Warsaw in Cusco, Peru.
Specialists from many other universities and research centres also
joinedtheproject.Separate,butnolessimportant,thanksareowedto
the University of Arkansas for providing scan data from their survey
in2006.
Abstract
The paper describes the possibility of using 3D laser scans from two dierent surveying epochs for structural health monitoring. It uses the results of
two particular projects – the 2006 3D laser scanning of Samiapata rock by the University of Arkansas and the 2016 3D laser scanning by the Labora-
tory of 3D Laser Scanning at Wrocław University of Science and Technology – and discusses the methods, results, and limitations of comparing them.
Key words: El Fuerte de Samaipata, Bolivia, terrestrial laser scanning, cloud-to-cloud comparison, structural health monitoring
Streszczenie
W artykule opisano możliwość zastosowania laserowego skanowania 3D z dwóch różnych epok pomiarowych do monitorowania stanu zabytku.
Wykorzystano wyniki wykonanego przez University of Arkansas laserowego skanowania El Fuerte de Samaipata z 2006 r. oraz laserowego skanowa-
nia 3D z roku 2016 wykonanego przez Laboratorium Skanowania Laserowego 3D Politechniki Wrocławskiej. Omówiono wyniki i ograniczenia
proponowanej metody.
Słowa kluczowe: El Fuerte de Samaipata, Boliwia, naziemne skanowanie laserowe, cloud-to-cloud comparison, monitorowanie stanu zabytku

Checking data collected of the field
(photo by M. Telesińska)
Sprawdzanie zebranych danych
(fot. M. Telesińska)